一套算法控制机器人军团!纯模拟环境强化学习,Figure学会像人一样走路
璇ユ柟娉曠殑浜�偣濡備笅锛�
鍦ㄦā鎷熺幆澧冧腑杩愮敤寮哄寲瀛︿範锛岃�鏈哄櫒浜轰笉鏂�瘯閿欙紝瀛︿細鍍忎汉绫讳竴鏍疯蛋璺�€�
閫氳繃楂樹繚鐪熺墿鐞嗘ā鎷熷櫒锛屼粎鐢ㄥ嚑涓�皬鏃讹紝灏辨ā鎷熷嚭澶氬勾鐨勬暟鎹�€�
灏嗘ā鎷熶腑鐨勫煙闅忔満鍖栦笌鏈哄櫒浜轰笂鐨勯珮棰戞壄鐭╁弽棣堢浉缁撳悎锛屾棤闇€寰�皟锛屽氨鑳芥妸妯℃嫙鐜��涓�殑绛栫暐搴旂敤浜庣湡瀹炴満鍣ㄤ汉銆�
鍦ㄦā鎷熺幆澧冧腑杩愮敤寮哄寲瀛︿範锛岃�鏈哄櫒浜轰笉鏂�瘯閿欙紝瀛︿細鍍忎汉绫讳竴鏍疯蛋璺�€�
閫氳繃楂樹繚鐪熺墿鐞嗘ā鎷熷櫒锛屼粎鐢ㄥ嚑涓�皬鏃讹紝灏辨ā鎷熷嚭澶氬勾鐨勬暟鎹�€�
灏嗘ā鎷熶腑鐨勫煙闅忔満鍖栦笌鏈哄櫒浜轰笂鐨勯珮棰戞壄鐭╁弽棣堢浉缁撳悎锛屾棤闇€寰�皟锛屽氨鑳芥妸妯℃嫙鐜��涓�殑绛栫暐搴旂敤浜庣湡瀹炴満鍣ㄤ汉銆�

涓轰簡鎶婃ā鎷熺幆澧冪殑璁�粌鎴愭灉搴旂敤鍒扮湡瀹炴満鍣ㄤ汉涓婏紝鍥㈤槦閲囩敤浜嗕袱绉嶅姙娉曘€�
涓€鏄�湪妯℃嫙璁�粌鏃惰繘琛屽煙闅忔満鍖栵紝璁╂満鍣ㄤ汉鎺ヨЕ涓嶅悓鐨勭墿鐞嗗睘鎬э紱浜屾槸鍦ㄧ湡瀹炴満鍣ㄤ汉涓婂畨瑁呴珮棰戞壄鐭╁弽棣堣�缃�€�
杩欐牱涓€鏉ワ紝妯℃嫙鐜��涓��缁冨ソ鐨勭瓥鐣ワ紝鏃犻渶浠讳綍寰�皟锛屽氨鍙�互銆岄浂鏍锋湰銆嶈縼绉诲埌鐪熷疄纭�欢涓娿€�
浜哄舰鏈哄櫒浜烘湁涓�緢澶х殑浼樺娍锛屽畠鐨勭‖浠跺钩鍙伴€氱敤鎬у緢寮猴紝鑳芥墽琛岀被浼间汉绫荤殑浠诲姟銆�
涓嶈繃锛孯L璁�粌鍑烘潵鐨勭瓥鐣ワ紝鏈夋椂涓嶆槸鏈€浣崇殑锛屾病鍔炴硶璁╂満鍣ㄤ汉璧板嚭浜虹被璧拌矾鐨勬劅瑙夛紝姣斿�鑴氳窡鍏堢潃鍦般€佽剼灏栬宫鍦帮紝鎵嬭噦鎽嗗姩鍜岃吙閮ㄥ姩浣滅殑閰嶅悎銆�
鎵€浠ワ紝鍦ㄨ�缁冩椂锛屼細濂栧姳閭d簺璧拌矾杞ㄨ抗鍍忎汉鐨勬満鍣ㄤ汉锛屾妸鍋忓ソ铻嶅叆瀛︿範涓�€�
杩欎簺杞ㄨ抗涓虹瓥鐣ュ厑璁哥敓鎴愮殑琛岃蛋椋庢牸寤虹珛浜嗗厛楠屾潯浠躲€�
闄や簡璧拌矾杞ㄨ抗鍍忎汉锛岀爺绌惰€呰繕璁剧疆浜嗗叾浠栧�鍔辨潯浠讹紝姣斿�浼樺寲鏈哄櫒浜洪€熷害璺熻釜銆佸姛鑰楁洿浣庯紝鏇村ソ鍦板簲瀵瑰�鐣屽共鎵板拰鍦板舰鍙樺寲銆�
浠庢ā鎷熷埌鐜板疄鐨勮法瓒�
鏈€鍚庝竴姝ワ紝鏄�妸妯℃嫙鐜��涓��缁冨ソ鐨勭瓥鐣ュ簲鐢ㄥ埌鐪熷疄鐨勬満鍣ㄤ汉涓娿€�
妯℃嫙鏈哄櫒浜哄彧鏄�珮缁存満鐢电郴缁熺殑杩戜技锛屽湪妯℃嫙鐜��涓��缁冪殑绛栫暐鍙�兘淇濊瘉鍦ㄨ繖浜涙ā鎷熸満鍣ㄤ汉涓婃湁鏁堬紝涓嶄竴瀹氳兘鍦ㄧ湡瀹炴満鍣ㄤ汉涓婃�甯稿伐浣溿€�

璇存槑鐜版湁鐨勭瓥鐣ヤ笉鐢ㄥ啀鍋氳皟鏁达紝灏辫兘鎺ㄥ箍鍒板ぇ鎵规満鍣ㄤ汉锛屽�鏈�潵鐨勫ぇ瑙勬ā鍟嗕笟搴旂敤鏄�釜濂芥秷鎭�€�
Fi鈥�gure Robotics
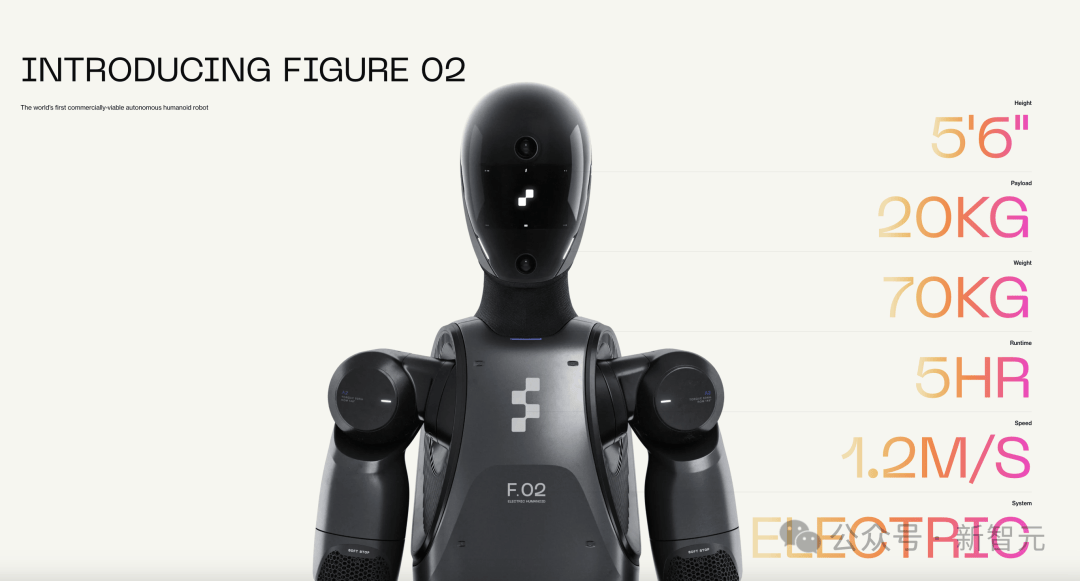
韬�珮鍜屼綋閲嶄篃瀹岀編妯℃嫙涓€涓�垚骞寸敺鎬с€�
褰撴満鍣ㄤ汉鑳藉儚浜虹被涓€鏍峰�浼氳嚜鐒惰�璧帮紝鏄�惁鎰忓懗鐫€涔熻兘鍍忎汉涓€鏍峰�浼氬叾浠栥€岃嚜鐒躲€嶅姩浣滐紵
鏇村姞閲嶈�鐨勪竴涓�€岄殣鍠汇€嶆槸锛岀洰鍓嶆墍鏈夌殑浜哄舰鏈哄櫒浜洪兘鏄�寜鐓т汉绫荤殑褰㈡€佹墦閫犵殑銆�
杩欐洿鍔犳柟渚夸簡鏈�潵鏈哄櫒浜轰笌浜虹被鐢熸椿鐨勮瀺鍚堛€�
闄や簡鑷�劧琛岃蛋锛屾満鍣ㄤ汉杩樻湁寰堝�銆屼汉绫绘妧鑳姐€嶉渶瑕佸�涔狅紝浣嗕粬浠�凡缁忓湪璺�笂浜嗐€�
鍙傝€冭祫鏂欙細
https://www.figure.ai/news/reinforcement-learning-walking